

关于这个L2-3的中间产品,其具体功能并没有明确的定义,各家车厂都会提出自己的产品需求。

自动驾驶感知和定位中的传感器融合成了无人驾驶领域的趋势,融合按照实现原理分为硬件层的融合, 如传感器厂商利用传感器的底层数据进行融合;数据层融合, 利用传感器各种得到的后期数据,即每个传感器各自独立生成目标数据,再由主处理器进行融合这些特征...
在本篇文章你将会读到:第一部分:ADAS开发的虚拟仿真平台;第二部分:描述传感器融合的过程,其中两个ADAS功能用于检测静态障碍物和跟踪车辆;第三部分:传感器融合的模拟结果;第四部分:总结全文并指出未来研究工作的方向

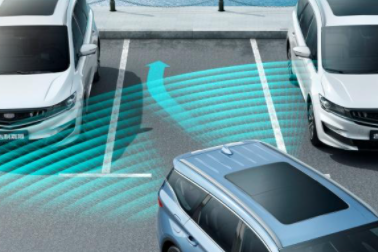
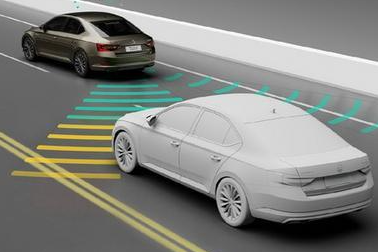
无人驾驶过程中,环境感知信息主要有两个部分:一是行驶路径上的感知,二是周边物体感知。行驶路径上的感知,对于结构化道路可能要感知的是行车线,就是我们所说的车道线以及道路的边缘、道路隔离物以及恶劣路况的识别;对非结构道路而言,其实会更加复杂。

自动化的好处包括可以降低人为错误的可能性,节省随机工作流程中重复工作所浪费的时间。随着先进的驾驶辅助系统和自动驾驶技术的引入,汽车集成电路(IC)的复杂度呈快速增长。
在ISO-26262标准中,以功能安全管理(Management of functional safety)、汽车产品设计开发的安全生命周期(Safety lifecycle)及分析定义汽车安全完整性等级为主要规范。

本文将回顾并评论集成电路的已知ISO26262功能安全要求,通过讨论既往基于IEC 61508及其在工业领域的应用的案例,给各位一些参考。

本文对汽车电子领域涉及到电控系统开发过程中的ISO26262功能安全设计、测试、安全等级评估等内容和方法要求进行研究,为汽车电子功能安全技术的应用提供一些借鉴。

随着新的ISO26262标准的引入,安全相关功能的要求变得比以前更加具有挑战性。同时,功能安全也被定义得更加精确和清晰了。经过正式验证的系统和对现有解决方案的重复使用,自此也不再互相矛盾。硬件和软件中的通用安全模块可以提供经过验证的组件。

本文对新企业如何导入ISO26262作全面讲解



