
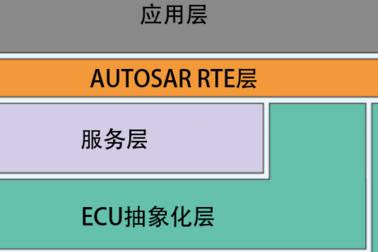
AUTOSAR架构在三个软件层之间划分出最高的抽象层:应用层(Application Layer, ASW),运行时环境(Runtime Environment, RTE)和底层软件(Basic Software, BSW),三者均在微控制...

综上分析,可知AutoSar网络管理只针对KL30节点。状态机中的Power和Sleep状态是针对ECU,而非CPU对说的。但是,软件是在CPU里运行,CPU只有供电才能运行软件。
标准不一定要求现存的软件(例如AUTOSAR基础软件)必须重新开发以保证“免受干扰”,只要安全相关软件没有受到负面影响或干扰就可以。尽管如此,为了整个系统的安全,必须始终保证不受所有软件组件之间的干扰(达到ASIL D级)的限制。
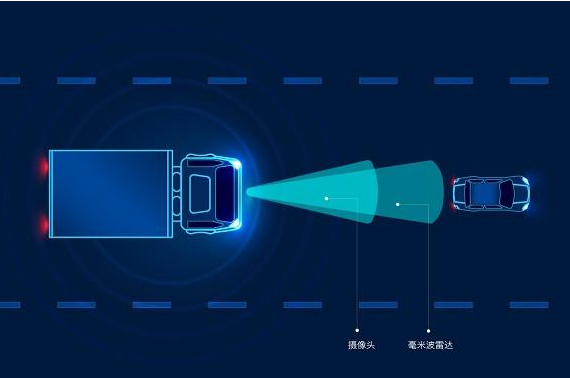
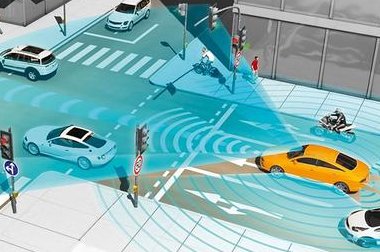
车辆和行人检测技术是高级驾驶辅助系统(ADAS)和自动驾驶的最重要组成部分。毫米波雷达与摄像机的融合是提高环境感知性能的重要趋势。本文提出了一种基于毫米波雷达和摄像机的车辆和行人检测方法。此外,该方法基于雷达数据和滑动窗口算法生成的动态区域...
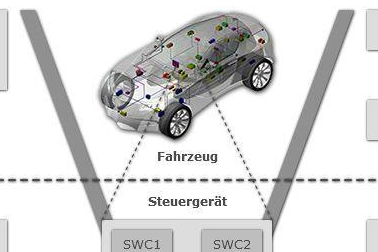
汽车电子控制器中目前基本遵循AUTOSAR规范,而其中操作系统作为BSW的重头戏,始终让学习AUTOSAR的同学望而生畏,进而望而却步。所以,今天Demu整理下基于AUTOSAR规范的操作系统知识,方便大家学习,以供参考。
去年十月,Waymo 完成了一项卓越非凡的成就——正式推出完全无人驾驶出租车服务 Waymo One。如今,在凤凰城郊区50平方英里的区域内,乘客能通过智能手机叫到一辆无人驾驶的克莱斯勒大捷龙商务车。但在这之后,Waymo One 就没有进...

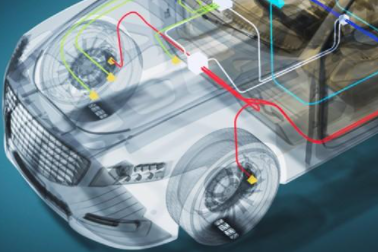
在整车上,所有这些功能要发挥作用,都需要依赖线束和电子组件。对于OEM和系统集成商来说,成本和时间压力都会显著的增加,因为这些公司需要现代化的解决方案来应对日益增加的车辆复杂性和产品开发时间压缩的压力。

随着汽车的智能化发展,如今汽车的自动化水平已经达到L3甚至更高水平,智能网联汽车的信息安全,必须在产品概念阶段就开始考虑。
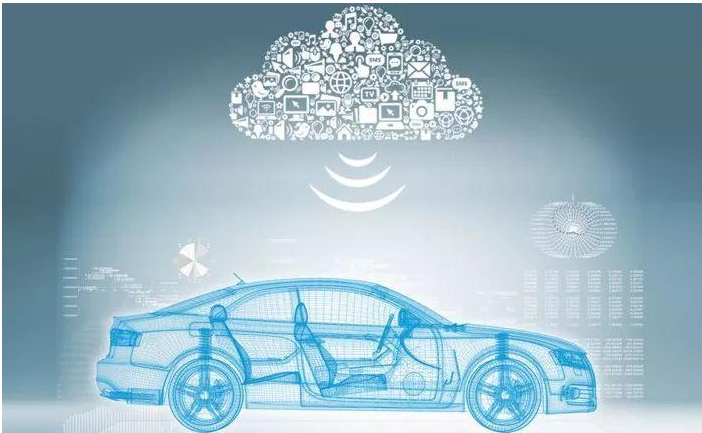
Automotive IQ通过对100多位汽车行业专业人士的调查,发现远程连接功能正推动汽车行业发生重大变化和多样化发展。
现代汽车正在进行智能化和网联化的巨大变革,引入大量的感知设备/计算设备,在车内设备交互及汽车与外界交互的过程中,给车载网络增加很多流量压力,传统总线的带宽难以为继,以太网技术被越来越多的研究和应用,本文跟大家一起探索下为什么是以太网?汽车以...



