

测试要求:验证功能安全要求在整车层面的正确的执行;验证安全机制在整车层面的正确功能性能、准确性和时序;验证整车层面外部接口实现的一致性和正确性;验证安全机制在整车层面的失效覆盖率的有效性;验证整车层面的鲁棒性水平。

ISO 26262-6 5.4.6中建议,在软件开发的启动阶段,对于启动软件级产品开发,首先需要制定关于整个软件级开发的活动和方法的计划,对于软件开发的每个子阶段,应该根据应用规范来选择对应的方法和相应的工具。
当我们讨论软件,硬件,功能层面的分解与集成,从属及映射关系时,会牵扯出元件,构件,中间件,组件,模块,系统等很多概念,乱不乱?非常乱。但如果无法区别这些概念,在沟通的基础语言上就会出现大量问题,这是不利于产品全流程工作的。流程的第一步就是对...

aspice 几乎涵盖了软件开发的方方面面,在软件开发过程中,有疑惑的地方都可以去aspice里去寻找灵感。 对于初创公司,应该以人为本。结合人的长处,来发挥每个人的主动性和热情,而不必因岗招人。 aspice 中要求输出很多工作产品,...
很显然,高精地图要实现精准定位和不断向前延展提升其功能性能就必须通过不断的优化自身的融合定位方案来获得。这一过程包含两个主要的软件算法。其一是通过全状态-扩展卡尔曼滤波进行车辆位姿的动态最优估计;其二是使用视觉传感器获取道路环境的语义信息,...
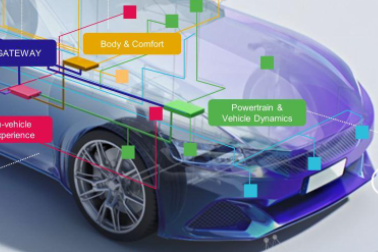
面向服务的软件架构SOA以其标准化的服务接口、松耦合的服务机制以及可组合扩展的服务特性,为实现“软件定义汽车”夯实了框架基础。

在对某个产品展开功能安全分析与开发之前,需要先明确产品的功能以及产品的边界。这一活动被称为“相关项定义”。本文研究的对象为线控制动产品eBooster。

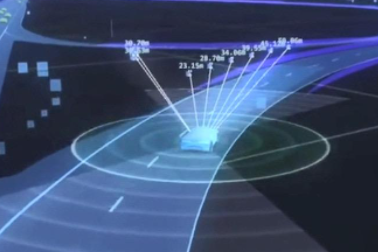
汽车工业正在将传感器融合作为应对日益增加的自动驾驶汽车所需的复杂性和可靠性的最佳选择,为汽车内部如何管理和利用来自多个设备的数据的另一转变奠定了基础。因此,将传感器融合作为前进的方向成为了人们关注的焦点,它将多种多样且互补的传感方式融合在一...

在车辆动态称重系统中主要应用了两种数据融合方法,称重板同类传感器的多传感器数据融合和压力传感器、加速度传感器的异类传感器数据融合。(这里采用最优加权平均进行数据融合)。

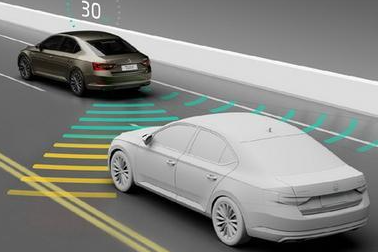
自动泊车、公路巡航控制和自动紧急制动等自动驾驶汽车功能在很大程度上是依靠传感器来实现的。重要的不仅仅是传感器的数量或种类,它们的使用方式也同样重要。目前,大多数路面上行驶车辆内的ADAS都是独立工作的,这意味着它们彼此之间几乎不交换信息。只...



