
在本篇文章你将会读到:第一部分:ADAS开发的虚拟仿真平台;第二部分:描述传感器融合的过程,其中两个ADAS功能用于检测静态障碍物和跟踪车辆;第三部分:传感器融合的模拟结果;第四部分:总结全文并指出未来研究工作的方向

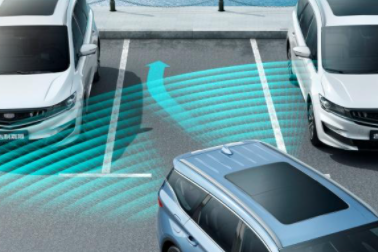
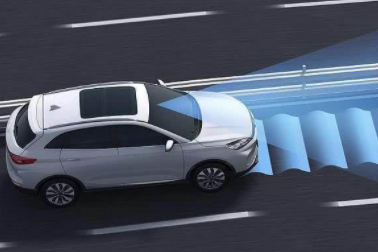
无人驾驶过程中,环境感知信息主要有两个部分:一是行驶路径上的感知,二是周边物体感知。行驶路径上的感知,对于结构化道路可能要感知的是行车线,就是我们所说的车道线以及道路的边缘、道路隔离物以及恶劣路况的识别;对非结构道路而言,其实会更加复杂。
摘要对于自动驾驶汽车想必很多人是既陌生又熟悉的,大多数人都会在意它的可靠性,安全性,以及舒适性等因素,现阶段确保自动驾驶汽车上路的安全应该是最为重要的。
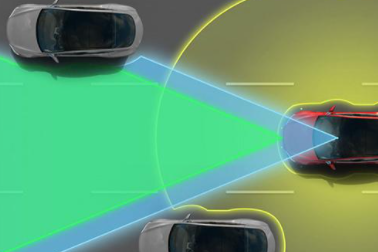
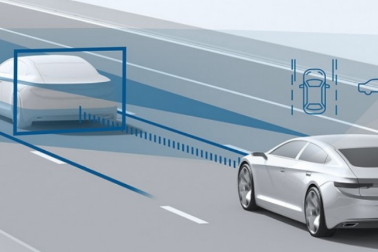
自动驾驶的四大核心技术,分别是环境感知、精确定位、路径规划、线控执行。由于环境感知和精确定位都需应用多个传感器,传感器融合技术正是归类于这两大核心技术的。

ADAS系统的安全概念设计工程实例
为了尽量减少车祸数量,汽车制造商、供应商、政府机构、学术界、甚至非汽车技术提供商正在联合开发先进的驾驶辅助系统(ADAS)和自动驾驶汽车。这个全新的汽车生态系统融合了来自各个领域的大量先进技术。

随着高级智能驾驶功能的增加,以自动驾驶为核心的产业链市场不断扩大。在自动驾驶需求的拉动下,被称之为“自动驾驶之眼”的LiDAR,其市场规模也在快速扩大。



