
由于车载领域是最大的嵌入式系统,这些年的发展,不可避免的会引入一些成熟的商务模式。目前看,车载应用的服务化不可避免的会成为未来几年的趋势。所以本文整理一些SoA的基本概念,讨论车载领域该如何引入SoA。

引言 作为汽车人,如果你还不知道SOA,是不是觉得已经落伍了?最近,整个行业充斥着这样的焦虑,但焦虑本身有啥价值呢?这份焦虑又该如何解决呢?本文将站在汽车人的角度讲讲这些。 现在SOA风头越来越旺,俨然是一头站在风口的猪,虽说事是好事...

很多人会质疑夸大了丰田的L2,但仔细研究后就会发现,丰田的L2就是L4级自动驾驶,或者说丰田的硬件系统已经具备了L4级自动驾驶的能力和需求。众所周知L4与L3最大差别是L4能做到Fail-Operation,即具备两套完全不同的自动驾驶运算...

本文将对《智能网联汽车技术路线图 2.0》部分核心内容进行介绍,包括自动驾驶等。

最近我们的自动驾驶首发刷屏,ADS终于不是什么神秘组织了。今天回头看,这是锤炼一个创新产品的及其痛苦但又必须经历的过程。安全领域也不例外。这个过程,迫使我们抛开所有的标准、规范,拷问自己:本质上,自动驾驶的安全风险来自于哪里?

本文重点阐述鸟瞰图描述的整体软件架构中跟智能驾驶相关的部分。也就是“智能驾驶软件框架和基础组件” 部分。深入描述了这一部分的两个核心框架,“环境模型框架”和“EPX-SA模型的实现框架”。

智能驾驶软件架构涉及太多不同领域的技术(算法设计,算法加速,通讯,图像处理等等),每一个领域都可以是一个企业的专属产品。我们需要一种方法对涉及的纷繁复杂的相关产品做一个产品架构上的梳理。厘清不同产品之间的结构层次。不同产品之间的依赖关系。这...

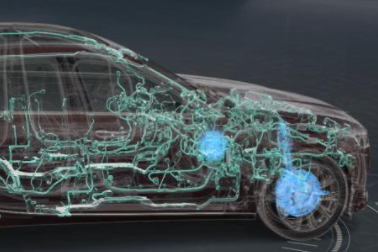
本文首先列出了汽车设计中的制约因素,然后描述了内部网络的主要标准和相关的信息安全漏洞。此外,还介绍了针对车辆的网络攻击的各种目标以及攻击策略。最后,介绍了新架构的推荐解决方案。

传感器就是无人驾驶车的“眼睛”,分布在车辆的顶部、前面和后面,可以“看”到相距240米内的场景。计算单元则是车辆的大脑,它隐藏在车身之中,对“眼睛”观察到的环境进行综合处理分析。

作为一种更安全、高效的出行方式,无人驾驶能够带来的影响远远超出人们的想象:除了带来交通方式的变革,它还将颠覆人们的工作、生活方式,重塑城市图景,甚至改变整个地球的生态环境。



