
本研究通过ISO 26262道路车辆功能安全标准在概念阶段分析可能存在的安全风险并设定安全目标,确定产品研发中每个项目元素的功能安全需求;在产品研发过程中采用满足技术安全规范的流程,并提供满足功能安全需求的有效措施。

在本篇中,我们将以一个平行侧方停车工况下的低速自动化实例来详细说明路径规划应用程序和跟踪控制算法的仿真验证。就目前国内外解决侧方停车的方法而言,常见的策略为路径规划加跟踪控制。

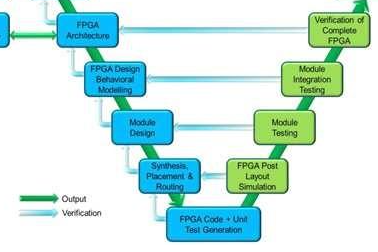
ADAS中,原型设计和控制阶段的实现都是风险的阶段,不太容易实现。事实上,这种反馈式算法的原型设计和测试需要大量的硬件和软件支持。

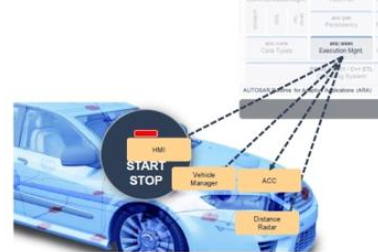
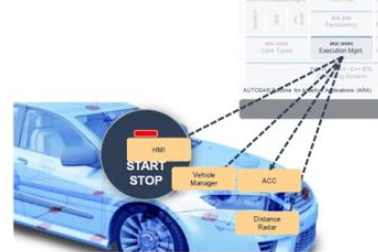
前方一辆汽车从右边进入了自车的车道,雷达和相机传感器识别到了前车,并已确认。为了安全起见,自车必须估算与出前方车辆的相对距离w.r.t.,如果距离小于允许的距离,则自车必须拉开距离,并保持安全距离直至完全停车。

过去一段时间,我们看到了一批又一批的智能驾驶公司涌现,也看到了少则几十亿多则百亿级的投入。资金是智能驾驶战场上最重要的子弹,谁钱多谁跑得快或者活的久几乎成了铁律。那么,这些钱都去哪里了?
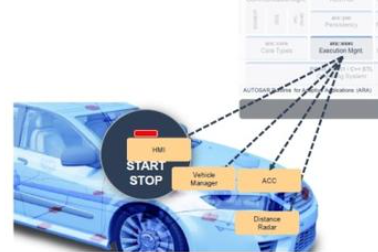
AUTOSAR自面世以来,从半导体工业、工具和软件厂商、零部件供应商到汽车制造商本身,整个汽车领域内的利益相关方都给予该标准积极的支持。2008年,宝马集团成为首家将AUTOSAR汽车开放系统架构应用于量产车的汽车制造商。
问题1:你认为AUTOSAR的实施是否有“终点”?问题2:仅仅是“追上”标准你认为够了吗?问题3:标准是否“束缚“了太多开发工作呢?
当我们讨论对AUTOSAR的“期待”时,比起大量收集AUTOSAR专家的意见,不如多聚集一些不了解AUTOSAR并对其不满的人来一起讨论和提出意见。为什么这么说呢?这是因为AUTOSAR专家虽然可能会给我们带来“可以期待的内容”,但是对在实...

汽车功能安全标准于2011年作为ISO标准正式颁布,此后,汽车业界开始采纳应用该标准。

为大家说明如何继承安全需求



