

因为ISO26262是面向安全的标准,如果不能满足的话,会面临更高的经营风险,比如海外市场开展业务,发生问题时赔偿金额很大。因此,应该尽早的量体裁衣、根据开发情况作出调整,以满足标准要求。

什么是AUTOSAR

自动驾驶,车联网,功能安全等造智能车必备的核心技术讲解
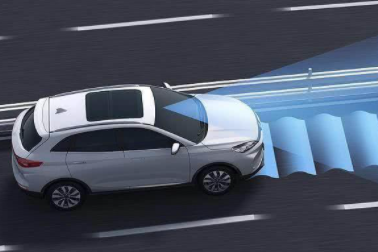
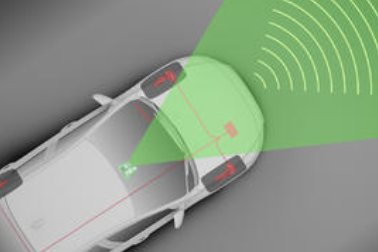
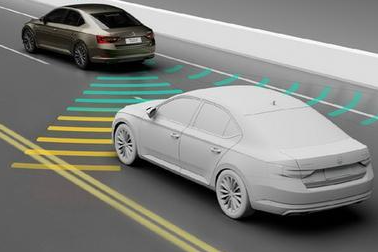
作为物联网体系中最有产业潜力、市场需求最明确的领域,车联网和自动驾驶汽车吸引了传统车企和新兴汽车厂商投入大量精力进行研发,但目前都处于相对初级的阶段,自动驾驶功能的实现主要依靠搭载在汽车上的摄像头、雷达等传感器。

本篇连载,我们将会为大家解读自动驾驶的发展历程。从性能和使用功能受限的独立控制系统,是如何发展到自动驾驶系统的呢?从这个过程当中,我们将一点点了解构成自动驾驶系统的细节和技术。
目前在市场上的商用车中广泛使用的是车载网络CAN(Controller Area Network)。但是由于CAN总线的最高传输速率为1Mbit/s(通常汽车CAN系统的实际使用速率最高为500kbit/s)。
系统讲述ISO26262汽车功能安全的定义与ASIL分级

更加快速可靠的通信协议:CAN FD(第1章)初步认识 CAN FD 引入CAN FD协议的背景及其标准化随着电子、半导体、通讯等行业的快速发展,汽车智能化的诉求也越来越强。为了提高汽车的安全性和舒适性,实现汽车的电动化和智能化,以及增强网...

CAN FD的帧结构CAN FD 帧由7个不同的位场组成,帧起始(SOF)、仲裁场、控制场、数据场、CRC校验场、ACK应答场、和帧结尾(EOF),本章介绍每个帧构成及其中包含的字段。

为何关于“自动驾驶”的定义争论不休?L3和L4的本质区别是什么? 目前,对于L3自动驾驶的应用有明显的分歧,这种现象在自动驾驶系统开发的现场随处可见。



