

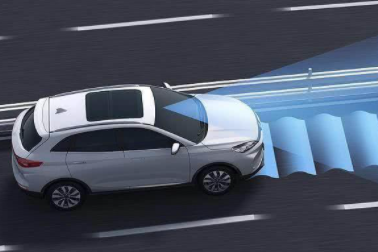
现在,基于雷达和摄像头的应用正广泛被用于实现更安全的驾驶。诸如自动巡航控制和道路偏离警示等先进驾驶辅助系统(ADAS)应用,一开始都还只是非常便利的特性,而今已在汽车的控制上扮演着非常积极主动的角色,支持一些像车道维持辅助(LKA)等功能。

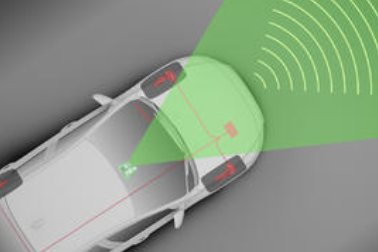
环视系统是停车辅助系统的重要组成部份,未来将会成为汽车的一项标准配备。随着人们对于驾乘体验以及方案可扩展性等要求越来越高,一开始由亚洲汽车制造商推动而兴起的利基型环视系统,如今已经成为主流汽车厂商提供的选配功能。
‘深度学习’(deep learning)已经改变了计算机在现实世界中观看、倾听与认知事物的方式。然而,对于半导体产业来说,最重要或许也最实际的问题是:深度学习将会深入智能型手机、可穿戴式装置或是自动驾驶汽车中使用的微型计算机视觉SoC吗?

自动驾驶,车联网,功能安全等造智能车必备的核心技术讲解
作为物联网体系中最有产业潜力、市场需求最明确的领域,车联网和自动驾驶汽车吸引了传统车企和新兴汽车厂商投入大量精力进行研发,但目前都处于相对初级的阶段,自动驾驶功能的实现主要依靠搭载在汽车上的摄像头、雷达等传感器。

本篇连载,我们将会为大家解读自动驾驶的发展历程。从性能和使用功能受限的独立控制系统,是如何发展到自动驾驶系统的呢?从这个过程当中,我们将一点点了解构成自动驾驶系统的细节和技术。
目前在市场上的商用车中广泛使用的是车载网络CAN(Controller Area Network)。但是由于CAN总线的最高传输速率为1Mbit/s(通常汽车CAN系统的实际使用速率最高为500kbit/s)。

为何关于“自动驾驶”的定义争论不休?L3和L4的本质区别是什么? 目前,对于L3自动驾驶的应用有明显的分歧,这种现象在自动驾驶系统开发的现场随处可见。
什么是AUTOSAR?什么是AUTOSAR?从不同的角度去看,有不同的答案。在过去的几年里,笔者总结了很多经验。 写这篇连载是一次难得的机会,可以将笔者这些年来所总结的经验进行整理,感谢各位阅读。

2020年将是自动驾驶市场商业气势大涨之年。如今,2020年实现L3量产已经成为行业预期和政府规划,各大汽车厂商为了实现自动驾驶车辆商业化,每年都在积极地研发新技术来增加汽车自动化功能。



