
首先来说明三个概念,自动驾驶 路径规划、避障规划、轨迹规划。路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。

特斯拉的Autopilot在“自动驾驶”领域是不争的标杆地位,即便是标杆,特斯拉Autopilot的负面新闻也是满天飞的,一个很大的原因就是事故太多,以至于特斯拉官网已经低调撤下了涉嫌吹嘘夸大能力的描述。对于正处于消费者慢慢相信自动驾驶技术...

用4级或5级来定义自动驾驶很难有一个明确的标准,自动驾驶也不应该搞得很复杂。自动驾驶实际包含三个问题:一是我在哪?二是我要去哪?三是如何去?能完整解决这三个问题就是真正的自动驾驶。

车展期间,关于自动驾驶的大新闻非常多,有不少话题都值得进一步探讨,但为了避开过去一周多高强度的信息轰炸,《九章智驾》选择了“错峰发稿”。本文涉及的话题主要有:1.“传统IT思维”VS“互联网思维”;2.华为“亮剑”之后,Robotaxi公司...

2021年4月7日,工信部公开了《智能网联汽车生产企业及产品准入管理指南》(试行)(征求意见稿) ,文件第一条指出:“针对申请准入的具备有条件自动驾驶、高度自动驾驶功能的智能网联汽车生产企业及其产品,制定本指南。”而根据中国工信部在去年3月...
自研自动驾驶OS(已取得成功)的车企或自动驾驶公司,无论特斯拉还是Waymo、Mobileye、华为或苹果,都有一个共同点:有自主研发的ASIC芯片。那么,有没有这样一种可能:打算自研自动驾驶OS的车企,先从英伟达或Mobileye挖个芯片...

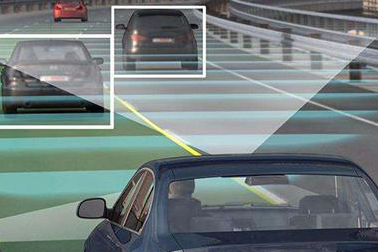
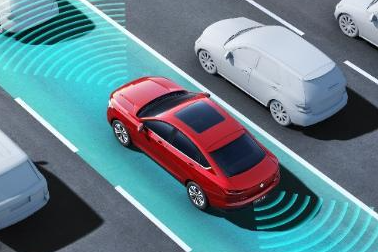
自动驾驶系统通常有感知层、决策层和执行层三部分构成。
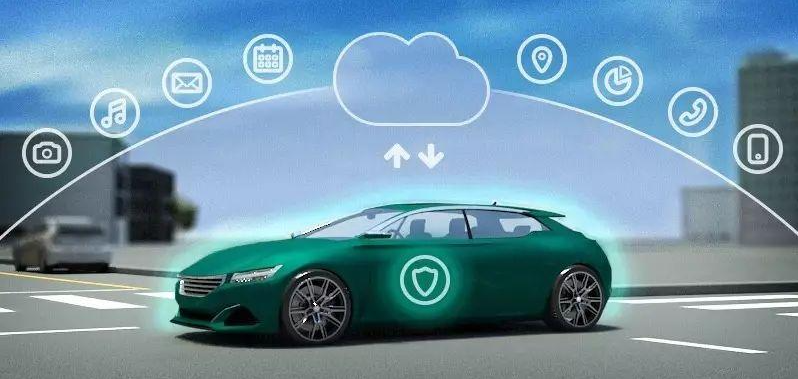
今天的5G手机面临的一大挑战是,天线太多,手机空间太小。未来的汽车也将面临这样的问题。
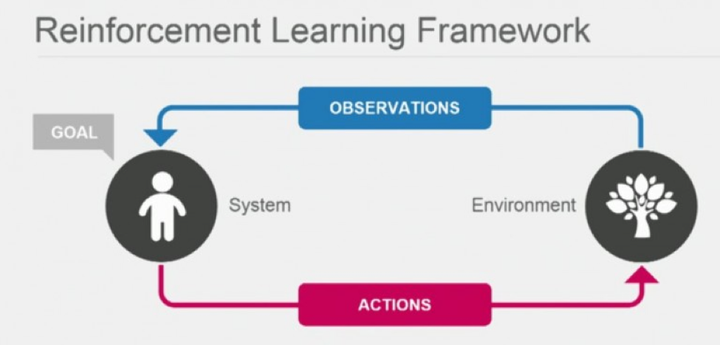
今天,机器学习算法被广泛应用于解决自动驾驶汽车制造的各种挑战问题中。人类将传感器数据处理集成到汽车的ECU(电子控制单元)中。 提高机器学习的利用率去完成新的任务是十分必要的,潜在的应用包括对驾驶员条件的评估,或者通过不同的外部和内部传感器...

很多人会质疑夸大了丰田的L2,但仔细研究后就会发现,丰田的L2就是L4级自动驾驶,或者说丰田的硬件系统已经具备了L4级自动驾驶的能力和需求。众所周知L4与L3最大差别是L4能做到Fail-Operation,即具备两套完全不同的自动驾驶运算...



