
1.自主机器人近距离操作运动规划体系在研究自主运动规划问题之前,首先需建立相对较为完整的自主运动规划体系,再由该体系作为指导,对自主运动规划的各项具体问题进行深入研究。本节将根据自主机器人的思维方式、运动形式、任务行为等特点,建立与之相适应...

导读:本文由Vehicle授权发布,作者为Pirate Jack。本节主要介绍在自动道路驾驶领域现有研究中使用的规划技术。给定一条由路线规划(导航)提供的路线,在道路上行驶的运动规划(以下简称规划)主要是在考虑车辆运动模型、车辆应遵循的航路...

本文涵盖离散的以及连续的路径规划, 尽管现实世界是连续的, 但在很多情况下, 将世界离散化使得解决路径规划问题变得更加容易和快速. 学习路径规划, 主要的思考点有三个

自动驾驶中的路径规划是一种顶层导航问题的上层模块,主要通过一系列车道级引导规划,解决车辆从起点位置移动至终点位置。一般的路径规划与控制模块外围是交通预测模块,其输入是感知到的环境信息,包含如车道线、道路曲率、道路障碍物、交通标志牌等环境静态...

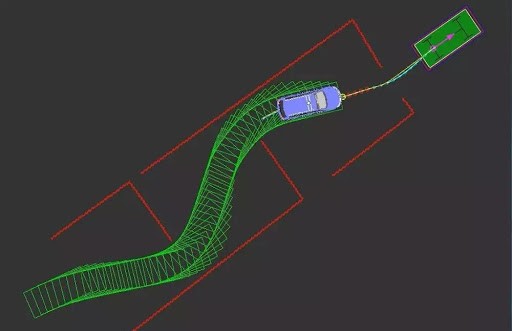
路径规划主要包含两个步骤:建立包含障碍区域与自由区域的环境地图,以及在环境地图中选择合适的路径搜索算法,快速实时地搜索可行驶路径。路径规划结果对车辆行驶起着导航作用。它引导车辆从当前位置行驶到达目标位置。
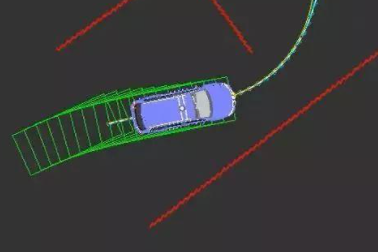
路径规划主要是让目标对象在规定范围内的区域内找到一条从起点到终点的无碰撞安全路径。路径规划中有静态路径规划以及动态路径规划。这里仅针对静态路径规划方法进行简单的介绍,以下路径规划仅指在静态环境下的路径规划。

毫米波是指波长在1-10mm的电磁波,其带宽大,分辨率高,天线部件尺寸小,能适应恶劣环境。车用毫米波雷达,通常采用结构简单成本较低,适合近距离探测的FMCW(调频连续波)雷达体制。雷达天线向外发出一系列连续调频毫米波,频率随时间按调制电压...

1、毫米波雷达基础解析1.1 什么是毫米波雷达1)工作在毫米波波段(millimeter wave )探测的雷达。工作频段一般为30GHz ~ 300 GHz, 波长 1~10mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的一些优点;...
很显然,高精地图要实现精准定位和不断向前延展提升其功能性能就必须通过不断的优化自身的融合定位方案来获得。这一过程包含两个主要的软件算法。其一是通过全状态-扩展卡尔曼滤波进行车辆位姿的动态最优估计;其二是使用视觉传感器获取道路环境的语义信息,...

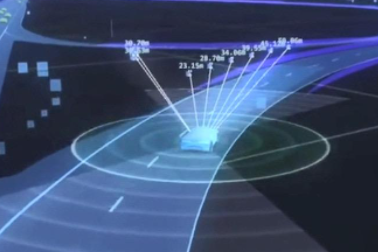
汽车工业正在将传感器融合作为应对日益增加的自动驾驶汽车所需的复杂性和可靠性的最佳选择,为汽车内部如何管理和利用来自多个设备的数据的另一转变奠定了基础。因此,将传感器融合作为前进的方向成为了人们关注的焦点,它将多种多样且互补的传感方式融合在一...



