

信息融合起初叫做数据融合(data fusion),起源于1973年美国国防部资助开发的声纳信号处理系统,在20世纪90年代,随着信息技术的广泛发展,具有更广义化概念的“信息融合”被提出来,多传感器数据融合MSDF (Multi-senso...

首先,需要明确一个老生常谈的概念——SAE对于自动驾驶等级的划分。SAE给自动驾驶汽车划分为5个等级,对于L5以下的自动驾驶汽车,要求必须有一个人类驾驶员(安全员)在场。目前,人工智能和人类驾驶员共同承担驾驶任务,而人类驾驶员被认定为汽车行...
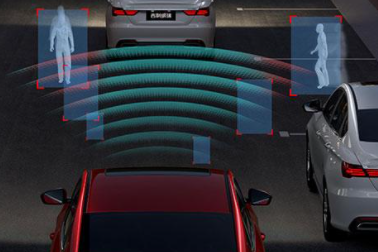
为了确保无人车对环境的理解和把握,无人驾驶系统的环境感知部分通常需要获取周围环境的大量信息,具体来说包括:障碍物的位置,速度以及可能的行为,可行驶的区域,交通规则等等。无人车通常是通过融合激光雷达(Lidar),相机(Camera),毫米波...

人类驾驶员会根据行人的移动轨迹大概评估其下一步的位置,然后根据车速,计算出安全空间(路径规划),公交司机最擅长此道。无人驾驶汽车同样要能做到。要注意这是多个移动物体的轨迹的追踪与预测,难度比单一物体要高得多。这就是环境感知,也是无人驾驶汽车...

动驾驶四大核心技术分别是环境感知、精确定位、路径规划、线控执行,而环境感知主要包括三个方面:路面、静态物体和动态物体,是自动驾驶和机器人领域的核心技术。深兰科技的熊猫智能公交车、AI智能扫路机、吸尘机器人、洗地机器人等多款产品,都深度应用了...

一、自动驾驶系统基本构成二 、环境感知 - 视觉传感器2.1 视觉传感器在ADAS系统中的应用目前摄像头在ADAS系统中主要用于车道线检测、交通标示识别、行人/车辆识别等任务;2.2 视觉传感器在自动驾驶系统中的主要作用a、障碍物探测 - ...

自动驾驶四大核心技术,分别是环境感知、精确定位、路径规划、线控执行。环境感知是其中被研究最多的部分,不过基于视觉的环境感知是无法满足无人驾驶要求的。

环境感知作为第一环节,处于智能驾驶车辆与外界环境信息交互的关键位置,其关键在于使智能驾驶车辆更好地模拟人类驾驶员的感知能力, 从而理解自身和周边的驾驶态势。相机、雷达、定位导航系统等为智能驾驶车辆提供了海量的周边环境及自身状态数据,这些以图...

导读因为电脑容易受到网络攻击,所以自动驾驶车辆(AVs)也容易受到网络攻击也就不足为奇了。本文讨论了黑客可以用来攻克自动驾驶车辆的方法。
考虑到这几篇AUTOSAR文档的结构完全一样,在此先对将涉及的文档做一个概括性说明。以CAN Driver规范为例,如下图1所示。



